
Gregory Schultz1, Martin Helmke2, Andrew Masters1, Joe Keranen1
- White River Technologies, Inc., Lebanon, NH
- West Chester University of Pennsylvania, West Chester, PA and GES, Inc., Exton, PA
Abstract
A particularly fast, simple, and cost-effective method for areal coverage mapping and infrastructure characterization has been established in the construction, property management and mining/quarrying business through the use of drone-based sensors. Recent developments in the miniaturization of atomic magnetometers have paved the way for small, lightweight implementations on unmanned aerial systems such as multi-rotor drones. From these developments, a new integrated digital geophysical mapping tool has emerged. The MAGPi system combines total field magnetometers, electro-optical imaging, drone-integrated magnetometer tow bird systems, autonomous surveying, drone mission planning, and data processing methods. The streamlined payload system is targeted at providing UXO wide area surveying technology for delineating risk amongst sites. Recent testing of the integrated unmanned aerial system (UAS)-based magnetometer has been conducted for UXO surveying over land and shallow water areas. This work emphasizes: i) improved stability of a highly compact sensor tow bird deployed at low altitudes in order to maximize sensitivity; ii) validation of application-specific procedures for navigation and mission planning; and iii) data processing workflow. Examples from recent flight tests and analysis demonstrate the capabilities and limitations of the emerging system technology. These include trials for rapid assessments of unexploded ordnance and damage assessments on runways as well as munitions localization and mapping over land and shallow water test sites in the northeast.
Introduction
Recent developments in UASs (or drones) provide new opportunities for geophysical surveying of munitions response sites by capturing high-resolution data and imagery not possible with conventional approaches. Drones are beginning to bridge the disparity in scale between traditional airborne remote sensing methods and ground-based monitoring techniques in various environmental applications. A wide range and selection of commercially available UAS platforms have entered the market that can be acquired off-the-shelf at increasingly lower cost. This availability and affordability has been complemented by rapid advances in the miniaturization of cameras, sensors, instrumentation, and data stores and transmission systems. Flying at lower altitudes (<10 m), the drone-based magnetometer remote sensing methodology allows for data capture at varying resolution and reduced costs. The methodology demonstrated in this article includes a combination of technologies: i) lightweight and highly sensitive atomic magnetometers; ii) commercially-available and highly maneuverable/controllable UASs (multi-rotor drones); and iii) integrated operational concepts and survey design strategies. Additionally, we are implementing data processing workflows for UAS system noise compensation, data collection, mapping and post-processing algorithms to generate work products to define munitions concentrations and nature and extent of munitions contamination.
Methods
A) MAGPi UAS Magnetometer Payload:
While magnetic sensors have been used on military systems since the 1940’s, the practical implementation of magnetic sensors on UAS platforms has many challenges. The general ruggedness, reliability, and high rate of productivity of commercial magnetic sensors, coupled with robust and simple data processing makes them a potentially attractive choice for military target detection and characterization applications – especially those for which an effective standoff sensing modality is required. Until recently, the most sensitive magnetometers have been prohibitively large and heavy, power hungry, and relatively expensive for anything other than niche applications. A significant progression in microsystems and quantum technologies has led to the development of numerous devices that have strong leveraging potential in the quest to reduce the size, weight, and power of magnetic sensors without a significant cost in terms of performance. By virtue of their small size, weight, power consumption and low cost, the range of applications in which atomic magnetometer technology can be applied is now greatly expanded.
Driven by the use of micromechanical components over the past decade, a new generation of high performance miniaturized atomic magnetometers emerged. Many of these technologies were pioneered by academic (e.g., Princeton University, University of Colorado, and University of California-Berkeley) and government or non-profit R&D labs (e.g., National Institute of Standards and Technology, Sandia National Laboratory, and Los Alamos National Laboratory). More recently, sensor manufacturers such as Geometrics, Inc. (San Jose, California) have begun to fully commercialize miniaturized atomic magnetometers. These new systems aggregate advances in micro-electromechanical systems (MEMS), implementations of atomic physics, optical designs, electromagnetics, and data acquisition in various forms. A number of publications have detailed the development and designs of these new magnetic sensors (e.g., Moreland, J. et al., 2005; Schwindt, P. et al., 2005; Prouty, 2007). The focus of this paper is on the practical integration of developing, or currently available, miniaturized magnetic sensors into operational UAS platforms or systems for UXO operations.
To facilitate modular integration with a wide variety of drone airframes, we developed a complete magnetic anomaly detection unit that includes not only a state-of-the-art miniaturized atomic magnetometer, but all the auxiliary sensors, data acquisition/synchronization/control electronics, power supplies, real-time embedded processing, and communications interface to significantly simplify the deployment and reconfiguration of miniaturized magnetometer technology. The MAGPi ML-4 magnetometer payload unit is a highly compact electronics package approximately 135mm by 25mm by 32mm (LxWxH) that fuses and synchronizes data from an atomic magnetometer (or gradiometer array), vector magnetometer, inertial measurement unit, on-board RTK-GPS, altimeter and other integrated sensors (Foley et al., 2019).
The MAGPi ML-4 unit utilizes a low-noise atomic magnetometer capable of ~1 picoTesla/√Hz sensitivity and sampled at 100-1000 Hz data rates (equivalent to cm-level ground sampling at nominal flight speeds). The unit is integrated into a 4.5 cm (1.75-inch) diameter ruggedized carbon-fiber towbird that weights approximately 1 kg (2.2 lbs). The unit is self-sufficient with respect to battery power supply (lasting up to 4 hours) and data storage and contains a quick release mount for in-air release and recovery. Data are stored locally and accessible via WiFi connection or direct access through a radio telemetry link (serial or Ethernet).
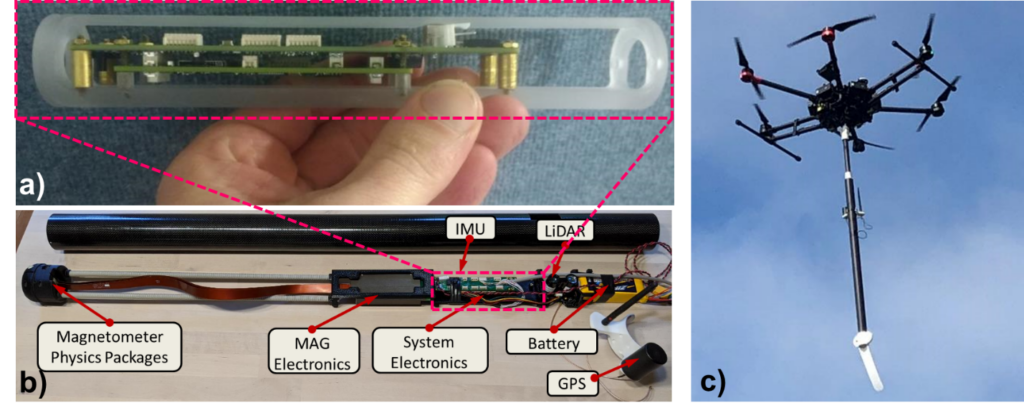
The MAGPi towbird is supported by a variable-length carbon-fiber cylindrical strut suspended from the drone and connected by a releasable link. If the payload were to run into something it should simply slide over the obstruction. This is unlikely to damage either the drone or sensor due to the rugged housing and low flight speeds (typically 2 to 5 meters per second. In contrast, drone magnetometer configurations utilizing a rope harness can easily snag on objects and vegetation. In addition, these flexible harnesses can create considerable magnetic motion noise due to sensor sway and so-called pendulum motions. In the unlikely event the MAGPi payload becomes snagged, the payload can be remotely detached from the drone and recovered by site personnel. A heavier fiberglass tow bird aerosonde has also been utilized from larger rotorcraft such as manned helicopters with an integrated fiber optic strength-member tether system for large-standoff (>10m) tow applications.
B) Industrial Multirotor Drone Integration
The recent expansion of the commercial multirotor drone market has led to a wide variety of commercially available industrial- or military-grade UASs. Increasing availability and affordability have complemented rapid miniaturization of cameras, sensors, instrumentation, and data stores and transmission systems. Defense applications of UASs have paved the way for civil infrastructure and construction applications, which have in turn paved the way for environmental site assessment and monitoring. This has led to a technology leveraging opportunity for UXO site remediation – especially for challenging sites with particularly difficult access, navigation, and maneuverability or safety conditions.
Multirotor systems are distinct from hybrid multirotor-fixed-wing, ornithopters, unmanned helicopters, or turbo-ducted airframes (Schultz et al., 2015). Commonly they utilize 4, 6, or 8 rotors to maintain stable flight with redundancy in the case of an in-flight rotor failure. A second characteristic is the level of autonomy implemented. Autonomy of interest for UXO applications is either fully programmable or pilot-assisted and generally includes aspects like automatic flight stabilization (roll, pitch yaw, and translational), altitude control, waypoint following, obstacle avoidance, station keeping, and leader-follower or swarming capability. Waypoint, precision line following, and terrain following autonomous missions offer a significant advantage over remote pilot-controlled flights, since flight criterion over an area of interest is consistent, fully configurable, and often more precisely executed by the robust commercial UAS control systems available today.
Many of these systems are designed with limited payload capacity (e.g., small cameras, etc.); however, we identified and tested commercially available drones that provide greater flexibility in terms of magnetometer payload capacity, power supply, and endurance (while remaining cost-effective). We have interfaced the MAGPi with the DJI S-1000, Matrice 210 and Matrice 600 Pro, Swiss-made SenseFly Albris, as well as US-made units UAV America Eagle, Turbo Ace Matrix ProE, and BFD Systems SE-8. The majority of our MAGPi flight testing has been with a DJI M600 programmed by UgCS terrain following control software and utilizing the SkyHub radar altimeter. More recently, we have integrated the MAGPi with a DJI S-1000 airframe chassis controlled by a PixHawk Cube, RTK GPS, and downward facing Ainstein (Lawrence, Kansas) radar altimeter for very precise terrain following altitude control. Additional details of our terrain following altitude control developments were described in a prior FastTIMES 2020 Volume 25 article entitled “Effective UAS Terrain Following for UXO Magnetometry” by Helmke et al.
C) Noise Mitigation, Source Location, and Moment Estimation
Integration of the MAGPi towbird with multi-rotor UAS systems requires consideration for magnetic noise sources that may be generated by the airframe or by motion of the towbird. For instance, mobile magnetic surveys may be affected by the fields and gradients produced by their platform as it maneuvers in the geomagnetic field, as well as any electrical systems associated with power generation/supply, avionics, computing and control. Removal of the mobile platform effects is a procedure known as compensation. Compensation can be active or passive. We have been successful in utilizing compensation software that calculates the UAS platform effects continuously and removes them from the measured data.
Even with a well-quieted platform, internal noise sources can be problematic, particularly for smaller UAS airframes, which may require positioning the magnetometer system in relative close proximity to potential noise producers. The standard noise compensation approach is to fly a series of high-altitude calibration maneuvers while collecting reference data, however, we have also developed methods for ground-based UAS calibration (or combination of coarse ground calibration and adaptive in-air fine tuning) that have been very effective at noise reduction.
A straightforward and effective method for reducing platform noise is the Tolles-Lawson method (Leliak, et al., 1961). The Tolles-Lawson approach uses a set of coefficients to describe the permanent, induced, and eddy current field contributions at a particular location on the platform. As the platform maneuvers (i.e., pitches, rolls, and yaws) through the local geomagnetic field, these contributions are projected onto the local field vector in a way that creates variability in the MAD sensor output. For a platform that is sufficiently characterized, standard compensation is quite effective. Figure 2 shows the results of compensation applied to a UAS MAD signal during five different aircraft maneuvers.
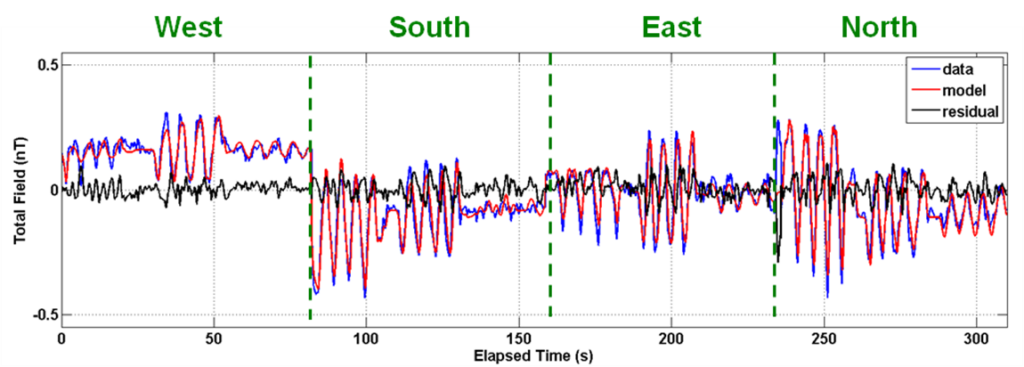
Figure 2. The total magnetic field associated with Tolles-Lawson maneuver noise compensation applied to small UAS MAD sensor data. The blue trace represents the total magnetic field output during five different aircraft maneuvers. The red trace represents the predicted output derived from applying the UAS’s standard calibration coefficients. The black trace represents the residual output (i.e., the difference between the measured and predicted outputs). Each cardinal direction contains a set of pitch, yaw, and roll maneuvers using the standard figure-of-merit approach.
Anomalous field profiles are created following the application of noise mitigation and detrending algorithms. Application of a detection threshold to the anomalous field profiles produce initial anomaly location estimates. Application of dipole inversion methods to regions of interest proximal to each anomaly location produce a refined anomaly source location (Easting, Northing, depth) and a magnetic moment estimate for each anomaly, enabling anomaly characterization by depth and magnetic size.
Mission Planning and Feasibility Analyses
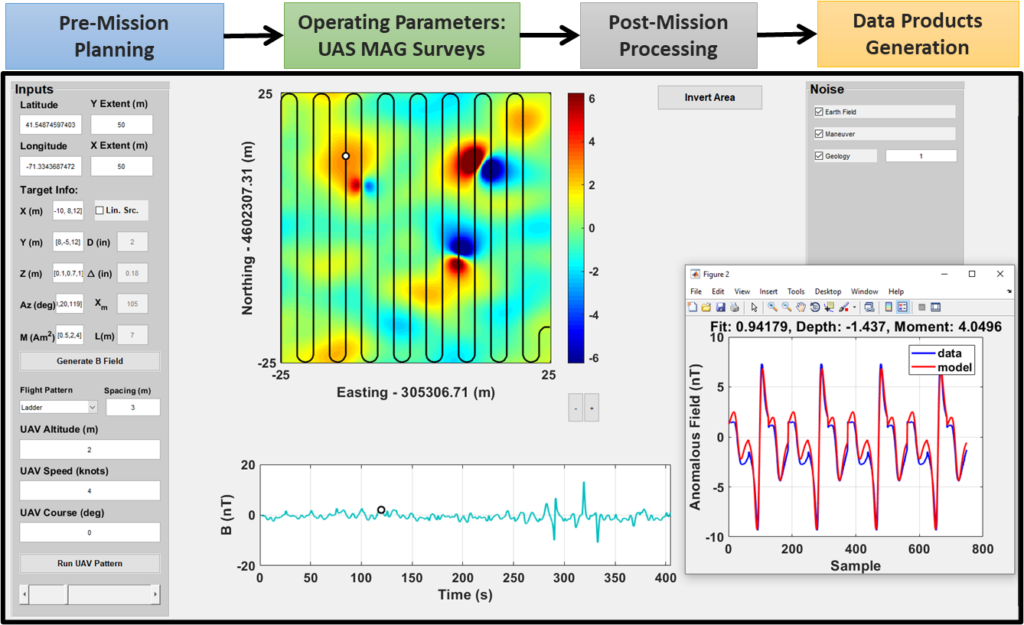
The link between mission planning, autonomous path following, navigation, and magnetometer data collection and processing is critical to successful implementation. As part of our approach to mission planning, we developed and implemented a magnetometer feasibility software tool – the MAD-UAS-Software-Environment or MUSE, to estimate the detection range characteristics for particular targets and noise regimes. This software enables prediction of UAS-based magnetometer performance given particular site locations, noise characteristics, and specific target scenarios of interest (size, type, depth, distribution). The MUSE software has been used previously to assess mission configurations and flight plans for US Naval airborne magnetometer systems exercises such as those conducted for airborne and undersea reconnaissance and surveillance.
An offline version of MUSE that is tailored for UXO site surveying provides feasibility analyses and is compatible with drone flight planning software such as DroneDeploy, Litchi, UgCS, and Mission Planner (Tmusic et al., 2020) and post-mission work product tools such as Pix4D. Pre-mission planning enables the pilot and flight planners to set an operating point in terms of altitude, speed, waypoint flight paths, and sweep width (i.e., transect spacing) to match a predicted set of mission success criteria based on post-mission data processing.
MUSE simulations such as those shown in Figure 3 are used to estimate survey coverage efficiency, best direction of transects, and maximum altitude for detecting particular UXO of interest. In this example, three simulated UXO targets have been added to seed the background anomalous field generated by a combination of data-based estimation and modeling for a particular site location. Seeded UXO targets were applied at [X,Y,Z] = [-10,8,0.1], [8,-5,0.7], and [12,12,1] meters and corresponding magnetic moments of 0.5, 2 and 4 Am2. The background field includes contributions from Earth’s main magnetic field (which varies by latitude and longitude), the local geologic or crustal field, and estimated airframe noise field (which varies with location and maneuvers). Once the target signature and noise magnetic fields are simulated, the user may vary the flight parameters to test varying survey offsets, orientations, flight speeds, and altitudes to evaluate and compare feasibility and estimate performance given a set of parameters. Magnetic dipole inversions can also be generated for anomalies to understand the potential of a particular simulated realization to generate data that supports inversions.
Airfield Damage and UXO Assessment
Starting around 2015, the US Air Force Civil Engineering Center initiated an airfield damage repair modernization program to ensure rapid and effective establishment and repair of airfields. A prerequisite to damage repair is optimizing a rapid characterization process including the identification of any UXO hazards. The use of small UAS sensor systems is a useful innovation that supports reducing risk of putting engineers or airmen on the ground to assess damage and locate munitions and explosives of concern.
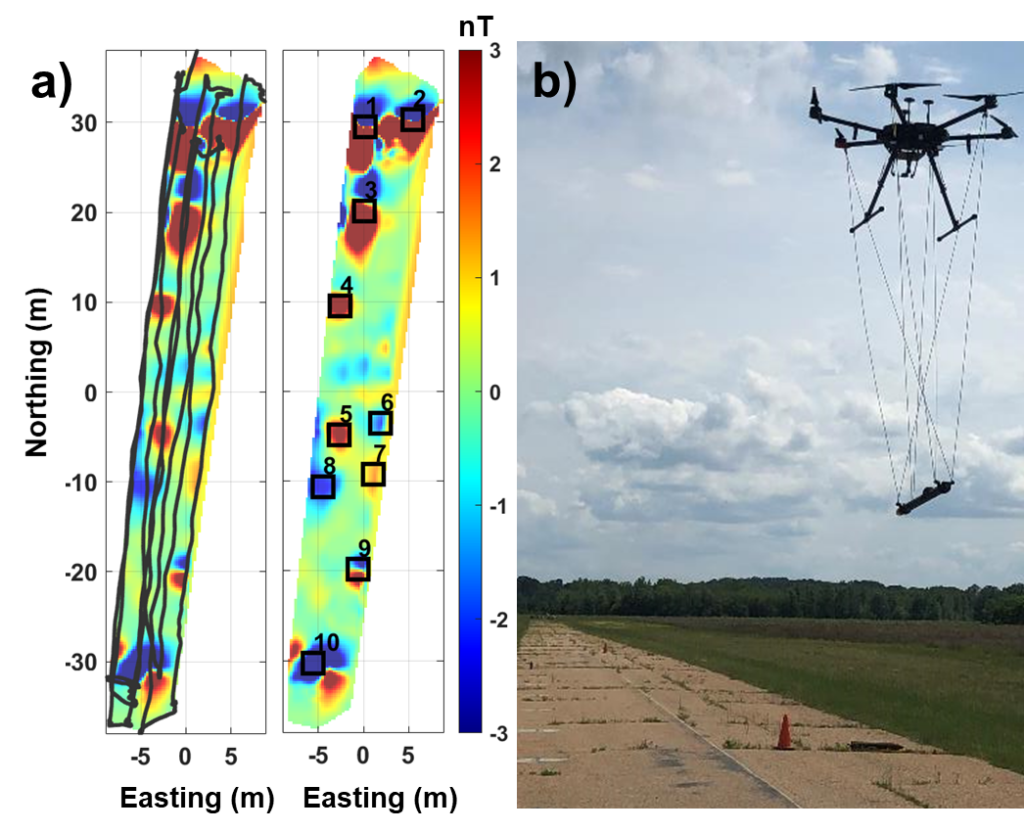
In 2019, we implemented the MAGPi on multiple airframes to test its utility for effectively detecting and locating airfield UXO. The unit was attached to DJI Matrice-210 and Matrice-600 drones and flown over a runway containing emplaced UXO test items in the Southern US. This early configuration utilized a completely flexible 6-point harness system with the MAGPi towbird unit oriented horizontally. The harness system was configured to self-dampen sway oscillations; however, stopping and turning caused moderate motions of the towbird.
Four separate sorties were successfully flown, each covering multiple transect passes over the runway test area. Flight altitude, flight speed, and survey maneuvers were varied to assess performance of the system. Sorties were flown at towbird altitudes of 2, 5, and 15 meters above ground level (AGL). We also flew a figure-of-merit calibration flight at approximate 90 meters AGL. Flight speeds varied from 2 to 22 meters per second (4-42 knots) with nominal flight speeds of approximately 4 meters per second (~7.7 knots). Each set of flight surveys contained 6-10 parallel transect passes along the direction of the runway.
The total field magnetometer data were processed and gridded using custom workflows to produce anomaly detection maps such as that shown in Figure 4. Despite imperfect transect trajectories across the airfield, total field anomalies less than 500 pT (peak-to-peak) are evident in the maps. At the lowest altitudes, airfield UXO items were readily detected, including items as small as 37mm projectiles and BLU-97 submunitions. At higher altitudes (nominally 5 or 10 meters AGL) only the medium to large items such as 105mm projectiles and “large penetrator” UXO were detectable. Metal rebar and inserted vertical steel pipe sections in the runway over our survey area added to the complexity of distinguishing smaller targets at altitudes more than a few meters AGL.
A summary of the target encounters is described in Table 1. Slant ranges were determined by computing the range to each target for the aerial transect at the furthest distance where the target was still detected in the total magnetic field data. Also reported are maximum range at which each target is estimated to be detectable based on the application of a magnetic dipole model using the approximate ferrous mass. The maximum range calculations utilized an estimated background noise level of 250 pT based on calibration flights at the site.
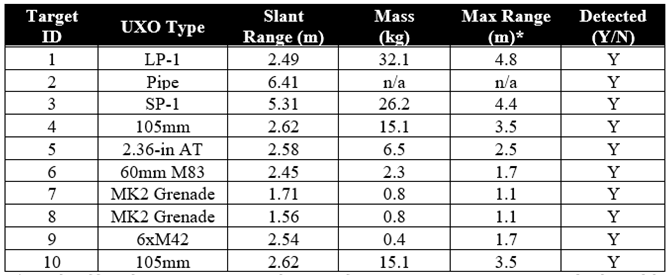
* simulated based on approximate metal mass and worst-case orientation magnetic dipole model and an estimated background site noise level of approximately 250 pT.
Limited Access Munitions Response Site Characterization
Limited access sites such as those in challenging and/or forbidding terrain are especially effective survey areas for drone-based magnetometer sensing. Examples of these environments may include areas with rapidly changing relief or otherwise challenging terrain such as mountainous landforms (e.g., cliffs, ridges, peaks, hoodoos, volcanic areas), desert landforms (e.g., mesas, canyons, gulches, dunes, boulders), glacial landforms (e.g., glaciers, crevasses, erratics), and some coastal landforms (e.g., surf zone, dunes, sea cliffs, sea stacks). Starting in 2019, we began developing specific UAS-sensing solutions to support UXO remediation in these particularly forbidding environments.
More recently, we completed test flights to survey and map UXO over land and submerged in shallow water. Land-based surveys were conducted to evaluate the limits of close terrain following and corresponding magnetometer sensing at extremely low altitudes. These were performed over a UXO test field in New Hampshire and achieved successful surveys at altitudes as low as 30cm AGL using the SkyHub radar altimeter. High signal-to-noise ratio data were acquired over targets as small as 60mm mortars. The gridded magnetic anomaly map and an example target inversion are shown in Figure 5. Similar results were achieved over shallow water tests where the radar altimeter was required to transition between flights completely over open water, partial open water and vegetation, and from water to land across the shoreline.
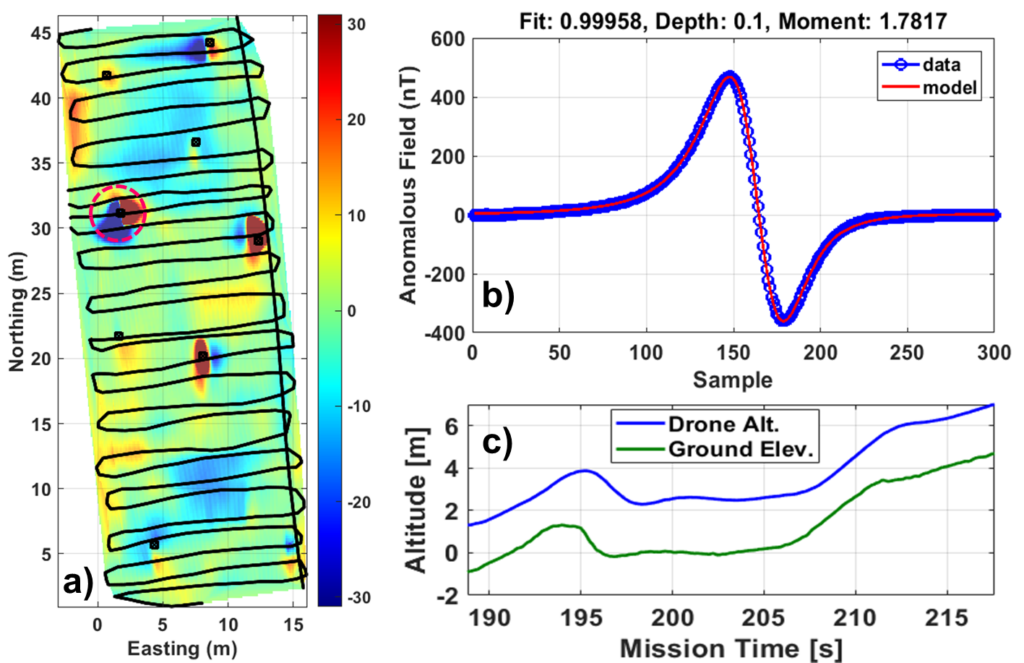
To test the efficacy of the radar terrain following system in changing terrain, the payload was flown over a berm and slope with a total of 6 meters of relief (Figure 6, lower right). The UAS successfully navigated the 40-degree berm slope at 2 meters per second with the magnetometer suspended 1 m above the ground. At a velocity of 5 meters per second, however, the 1-second response delay brought the payload close to contacting the hillslope. This illustrates the importance of programming the system to increase ground clearance and/or reduce velocity in areas of steep terrain or obstructions.
Conclusions
A confluence of technological improvements in mini-magnetometer sensors, multi-rotor drones, and highly compact precise navigation and control electronics have paved the way for UAS-based UXO mapping and location methods. Examples of the MAGPi towed magnetometer unit described here provide a snapshot of the capabilities and limitations of these integrated technologies for UXO operations over airfields and over more challenging sites such as moderate-high relief terrain and shallow water areas. Using terrain following altitude control with commercial or custom radar altimeter data processing, we have shown that magnetometer surveys can be conducted over a wide range of sites.
UXO site assessment over moderately-sized ranges from a few acres to 100’s of acres in size are well-suited for UAS-based sensing approaches. These sites represent the most effective type of implementation where larger manned fixed wing sensing may be prohibitively expensive or cumbersome, but over which person-borne sensing approaches (such as handheld or cart-based magnetometers) are impractical. Additionally, there are examples of sites with forbidding terrain or access where low-altitude airborne magnetometer sensing is the only option for understanding the extent of munitions contamination.
Acknowledgements
We thank Professor May-Win Thein and the UAS System Dynamics and Advanced Controls Laboratory at the University of New Hampshire for insights into cutting edge multi-rotor controls. We acknowledge Dr. Ernest Berney and colleagues at the US Army Corps of Engineers Environmental Research and Development Center Geotechnical and Structures Laboratory (ERDC-GSL) for their support of airfield UXO tests. We also acknowledge the support of the Environmental Security Technology Certification Program under Project MR19-5212 for major portions of this work.
References
Moreland, J., Kitching, J., Schwidt, P.D.D., Knappe, S., Liew, L., Shah, V., Greginov, V., Wang, Y.-J., and L. Hollberg, 2005. Chip scale atomic magnetometers, Meeting of the Military Sensing Symposia (MSS), Specialty Group on Battlefield Acoustic and Seismic Sensing, Magnetic and Electric Field Sensors (BAMS).
Schwindt, P., Knappe, S., Shah, V. Hollberg, L., Kitching, J., Liew, L. and Moreland, J., 2005. Chip-scale atomic magnetometers, Appl. Phys. Lett. vol. 85, 6409–6411. Technical Symposium and Workshop, Washington, DC.
Prouty, M., 2007. Progress in chip-scale total field magnetometers, Battlefield Acoustic and Magnetic Sensors, Laurel, MD, Aug 2007, BC01.
Foley, J., Schultz, G., Helmke, M., Bochicchio, D., and Ennis, J., 2019, Enabling advanced miniaturized geophysical sensor systems through unmanned aerial vehicle Integration, American Geophysical Union Fall Meeting, San Francisco, NS11C-0649.
Schultz, G., Keranen, J., Miller, J., and Shubitidze, F., 2015, Magnetic sensing from unmanned aerial surveillance platforms, Marine Electromagnetics Conference (MARELEC), Philadelphia, 2015.
Helmke, M., and Schultz, G., 2020, Effective UAS terrain following for UXO magnetometry, FastTIMES, 25(3), pp 132-133.
Leliak, P., 1961, Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft, IRE Transactions on Aerospace and Navigational Electronics, 1961.
Tmusic, G., Mafreda, S., Aasen, H., James, M., Goncalves, G., Ben-Dor, E., Brook, A., Polinova, M., Arranz, J.J., Meszaros, J., Zhuang, R., Johansen, K., Malbeteau, Y., deLima, I.P., Davids, C., Herban, S., and McCabe M.F., 2020, Current practices in UAS-based environmental monitoring, Remote Sensing, 12 (1001):1001, DOI: 10.3390/rs12061001.
Author Bios

Gregory Schultz
Gregory Schultz, Ph.D.
White River Technologies, Inc.
115 Etna Road, Bldg. 3 Ste 1
Lebanon, New Hampshire 03766
schultz@whiterivertech.com
Dr. Schultz is the Chief Technology Officer at White River Technologies, Inc. and Principal Investigator for geophysical system DOD research and development programs such as the ESTCP project MR19-5212. He has 18 years of experience with autonomous sensing, geophysical data processing and inversion, simulation, and implementation of miniaturized magnetometers in ordnance clearance, infrastructure, and environmental applications. Schultz is an FAA-licensed drone pilot specializing in autonomous remote sensing. He is leading multiple efforts to integrate advanced magnetometer and electromagnetic sensor payloads on a variety of unmanned systems including autonomous fixed wing and rotary aircraft and autonomous underwater systems.

Martin Helmke, PhD, PG
West Chester University of Pennsylvania
750 S. Church St.
West Chester, PA 19383
mhelmke@wcupa.edu
Dr. Helmke is a Full Professor of Hydrogeology in the Department of Earth and Space Sciences at West Chester University of Pennsylvania, President of Helmke Hydrogeologic, LLC, and Principal Hydrogeologist at Groundwater and Environmental Services, Inc. He is an FAA-licensed drone pilot with over 20 years of experience customizing fixed-wing and multi-rotor UAVs for scientific research and commercial projects. He is a scientific advisor to Groundwater and Environmental Services, Inc’s UAV program. Current research projects include UAV magnetometer and robotics deployment strategies to map UXO and pipelines, multi-instrument detection of abandoned petroleum wells, UAS photogrammetric and multispectral fracture trace analysis, and geophysical characterization of sinkholes and subsidence.

Andrew Masters
White River Technologies, Inc.
115 Etna Road, Bldg. 3 Ste 1
Lebanon, New Hampshire 03766masters@whiterivertech.com
Andrew Masters is a Research and Development Engineer at White River Technologies. He obtained a B.S. in Mechanical Engineering from the University of New Hampshire. He is a FAA-licensed drone pilot with over 5 years of experience in automation, controls, and unmanned systems. His research is focused on multirotor UAS platforms for swarming behavior, advanced controls, and automation. His recent work has been centered on automated image processing, simultaneous localization and mapping, and fusion of magnetic and electro-optical data.

Joe Keranen
White River Technologies, Inc.
115 Etna Road, Bldg. 3 Ste 1
Lebanon, New Hampshire 03766
keranen@whiterivertech.com
Joe Keranen is a Senior Research and Development Scientist at White River Technologies. He obtained a B.S. in Electrical Engineering from Michigan State University and an M.S. in Acoustics from Pennsylvania State University. His focus is on development of UXO detection, estimation, and classification algorithms as well as advanced munitions sensing and multi-sensor data fusion approaches. Mr. Keranen’s current work involves the development and application of expert analysis software that allows for full exploitation of advanced detection and classification sensors for production UXO site remediation. He has also worked to demonstrate the potential for productivity increases that could be realized by incorporating this advanced technology as part of production protocol.
