
Gert Riemersma
Introduction
When the local Crow Canyon Archaeology Center and the Canyons of the Ancients National Monument looked to map Sand Canyon, an ancestral Pueblo site in the area, they knew traditional mapping would not suffice. Using UAV LiDAR technology, they received impressive results and made some new discoveries.
The culturally rich Canyons of the Ancients National Monument in Colorado contains a wealth of historical and environmental resources. Now a recreational hotspot, in A.D. 1240, the Pueblo community occupied the area, constructing over 70 villages with approximately 30,000 residents. In Sand Canyon alone over 90 subterranean structures, known as ‘kivas’, were used by families as dwellings. Hundreds of years later, the preservation team were looking for a way to accurately survey this site of archaeological importance. It had been over 20 years since a survey of this calibre had been undertaken and they needed new ways to visualise the area.
In partnership with local UAV service experts, Caddis Aerial, Routescene Inc were chosen to create a high-resolution terrain model of the Sand Canyon Pueblo site using their UAV LiDAR 3D mapping solution. This turnkey solution was identified as the perfect system for penetrating the dense vegetation and producing high-resolution data. Fundamental to the Routescene system is a carefully thought through 6 step workflow which spans the entire utilisation of the solution – from survey and project planning, data acquisition, data processing to the final outputs or “actionable information”. This workflow is a set of orchestrated and repeatable procedures and processes, so every survey and subsequent data analysis is undertaken in a systematic, streamlined way; ensuring the best possible outcomes each time
Surveying the area
The team started the flight planning process by considering the objectives of the survey and the diverse terrain of the Sand Canyon area. The primary aim was to achieve as high a resolution Digital Terrain Model (DTM) as possible, devoid of trees and shrubs. The secondary objective was to ensure a high degree of accuracy, in particular, a relative accuracy with respect to the topographic survey conducted many years previously.
The UAV used was the DJI M600 Pro, chosen for its stability and high lift capacity. The UAV can sustain a flight duration of 15-20 minutes, dependent on environmental factors, and can collect data from an area of at least 400 x 400m in a single flight. Therefore, surveying 2+ km sq per day was a realistic and achievable aim. Designed in 2013 for use on UAV’s, Routescene’s LidarPod, the hardware element of their UAV LiDAR solution, includes a carefully selected array of sensors to ensure that the solution is fit for purpose across a range of different survey and mapping applications. The Velodyne HDL32, the workhorse of the modern UAV mapping industry, provides a scan rate of up to 1.4 million points per second from 32 different lasers angled in a 40 degrees field of view. The LidarPod has a radio modem built in to enable command and control but more importantly allows operations, complete with real-time QA monitoring, over a distance of more than 2km.
The team chose a take-off point on the main dirt road at the north of the survey area (Figure 1), with sufficient line of sight so the team could observe the UAV at the outer edges of the survey site. The terrain and the direction of the slope of the area had to be considered when deciding in what direction to fly the lines, in this case, the decision was made to fly the lines north-south at a constant altitude. The UAV was flown at 40m altitude relative to the take-off point, which meant that due to the undulating terrain, the altitude at the west and east boundaries was 20m. In the south of the area, the altitude was 60m due to steep cliffs.
During the survey itself, marshals were stationed to ensure members of the public did not enter the survey site. The LidarPod operators monitored in real-time in-flight the quality of the data being collected using Routescene’s QA Monitor

software. After each of the 3 flights the raw LiDAR data was inspected to ensure the highest quality was achieved. This prevented unnecessary repeat visits to this remote site.
The team planned the flight so that the outer boundaries were covered first and then they worked towards the middle where the take-off point was. This ensured that when the UAV battery reached the point at which to abort the mission, the time to fly home was as short as possible.
The aim was to ensure a very high DTM resolution, and this was achieved by flying as low as was safely possible, flying at a speed of 5m/s and setting the overlap between adjacent flight lines at 100%, meaning each piece of land was surveyed twice.
This flight planning not only created a higher data density but also increased the probability of the laser points hitting the ground. The use of a multi-laser LiDAR scanner within the LidarPod ensures that the lasers can hit the ground from all angles and this significantly improves the vegetation penetration capability of the system.
Once the UAV was ready to go, the mission plan was uploaded to the UAV from DJI’s GS Pro app. The M600 Pro was flown manually to the start of the mission and the mission flight plan executed from within the GS Pro App.
Ground targets
The first day was spent establishing ground control and undertaking a reconnaissance of the site (Figure 2).
Routescene has a strong ethos of Quality Assurance; with foundations in basic land survey training built upon by many years working in the offshore industry where QA\QC was of paramount importance. As part of the QA process, the team establish ground control in all our survey areas, accurately surveying in Ground Control points (GCP) and placing Routescene LiDAR targets on those points.
The targets placed on the GCPs are 60cm in diameter, mounted on small tripods and are covered in a highly reflective material; the retro-reflective material gives a high-intensity return which enables it to stand out and so is easy to spot in the resultant point cloud. As the targets are raised from the ground, they also enable the returns to be automatically extracted from the point cloud.
Never say never
There is always a possibility that additional data needs to be collected at a later date, be it unplanned or planned, so as a matter of course all GCPs were permanently marked using a peg driven into the ground. In the case of Sand Canyon, we identified a discrepancy in the position of the control points relative to the processed point clouds. To resolve this discrepancy the survey team visited the site again, this time mid-winter, to locate the control points under a foot of snow and resurvey the points. After extensive analysis, it was revealed

that the use of Microsoft Excel to store the GCP coordinates was proving detrimental. Excel rounds all numbers to six decimal places and, as it was storing geographical coordinates, this caused the team to lose up to 4m of accuracy. Reloading the original raw data into another format restored the accuracy, but left the ground survey team members rather displeased – a lesson learned.
Calibration control
Three of the targets were used to calibrate the Routescene LidaPod for boresight misalignment; the targets are positioned in a particular way as this enables the roll, pitch and heading misalignment to be determined. The targets are overflown in a specific pattern, and in the subsequent post-processing the boresight misalignments are computed and applied to the raw point cloud. In general, over time the Routescene team have observed that the heading misalignment is the smallest of the errors, and this can be attributed to the fact that we use a Dual heading antenna solution. The roll misalignment is the largest, and this is made up a variety of different misalignments, including the INS – LiDAR, LiDAR encoder, and laser diode misalignments.
Processing the data
Efficient data processing is crucial. After every mission, the data is downloaded from the LidarPod and inspected using Routescene’s proprietary LidarViewer Pro software. This software provides a framework on which to build a LiDAR processing workflow, using the Filter Development Toolkit to develop and apply specific filters to the collected point cloud, to achieve as quickly as possible the most accurate final deliverable. In this case, more than 3.2 billion points were collected, and it was important that the high resolution of the data was maintained during analysis to create a DTM. The filters used in an automated sequence were sector reduction, laser ID reduction, coordinate conversion, grid creation, the purpose-built “Bare Earth tool”, a skim grid and finally a LAS export filter. This process virtually removes all the vegetation from the site, to expose in detail the structures that the archaeologists were interested in. The resolution of the final output was an impressive 400 points/m2.
Bingo at 40%
The overall survey experience was mostly positive for the team involved. The survey was undertaken at a time of year when the temperature was 15-20 degrees C in the early morning, increasing another 5 degrees as the sun came out. The altitude of the survey area was 7000ft and as such this altitude had to be considered in the UAV mission planning as any aircraft’s performance is reduced the higher it flies. In this project, the density altitude was also a significant consideration. Density altitude is the altitude adjusted for atmospheric conditions, such as temperature and humidity. Operating early in the morning when the air was cooler made a significant difference to the density altitude, which was calculated at 9,000-10,000ft.
The UAV flying was a challenge for many factors, not just density altitude but also pilot experience on the craft, a newly purchased aircraft, and the payload. The agreement was made to “return to base” when there was 40% battery remaining; this is a generous safety margin but, given all the factors, was deemed to be a sensible approach. When the 40% battery capacity was reached the current flight line was completed, and the UAV brought into land, typically landing at 30% capacity.
The wind tends to increase mid-morning making the flying conditions even more challenging to the extent that it became outside our operational limits. It was fortunate that the team finished the last flight line when the wind further strengthened to beyond the flying limits; four separate flights with no incidents.
Surprising results
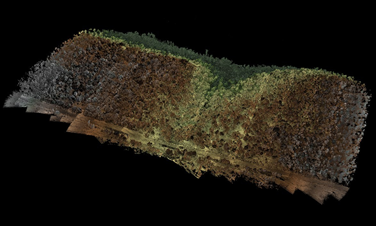
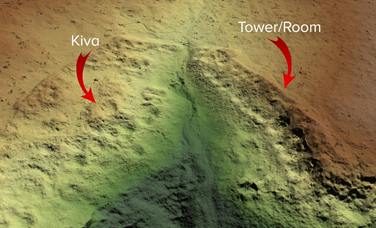
The results gained from the survey proved to be accurate and surprising for the preservationists involved. Although the Sand Canyon Pueblo was studied, mapped, and excavated between 1984 and 1995 using traditional survey techniques, the Crow Canyon Archaeological Center were excited to discover previously undocumented structures. The LiDAR image (Figure 3 and Figure
4) proved to be the best tool for visualising the ancient site in detail and to plan future preservation. Removing the need for painstaking ground surveys, the impressive data accelerated understanding of the Pueblo area and has allowed the client to concentrate their future work on the newly found structures.
Mark D. Varien, Executive Vice President of the Research Institute at Crow Canyon Archaeological Center stated that they were excited by the final results presented. The LiDAR image provides the best tool for visualizing this ancient site in detail to better
monitor the future condition of the site and has provided baseline data for the Canyons of the Ancients land managers to plan on- going preservation.
Varien said, “The impact of this survey approach is truly astonishing. It illustrated how the tool could be used to record undocumented sites with unprecedented precision. It removed the need for a painstaking ground survey and the speed of delivery of such detailed results is impressive. It has accelerated our understanding – the results indicate the pueblo was more extensive than we had previously imagined. We are now able to concentrate our future work in a small finite area – to study the new found kivas in more detail.”
For more information please visit www.routescene.com
Author Bio

Gert Riemersma Founder and Chief Technical Officer Routescene Inc. Durango Colorado, USA gjr@routescene.com
Gert Riemersma trained as a land surveyor and worked as a hydrographic surveyor for 20 years before getting involved in LiDAR and developing the Routescene UAV LiDAR solution in 2013. A private pilot since 1986, he worked as a navigator in 1985 on an aeromagnetic survey using a DC4 flying 16- hour sorties halfway across the Atlantic. More recently UAV projects range from the UK to Alaska, working with many different UAV operators. Founder and CTO of Routescene, eager to engage with customers, to see their operations first hand and gather valuable feedback to enable the Routescene products to evolve and further improve. Routescene designs and manufactures the UAV LidarPod and LidarViewer Pro software. Routescene’s customers have used the system all over the world, from Australia to Alaska, across a variety of different projects. Routescene global headquarters are based in Edinburgh, Scotland with office also in Durango, Colorado.

