
Martin Helmke, PhD, PG
Gregory Schultz, PhD
Unmanned aerial systems (UASs) provide an effective platform for deploying magnetometers and other sensors to locate unexploded ordnance (UXO) rapidly and safely. Detecting small (<100mm) UXO targets, however, requires a tight (<5 m) grid spacing, flying the sensor close to the ground surface (1 m), stable autonomous flight maneuvers, and excellent positional accuracy (<1 m). This presents a significant challenge for both hardware and the UAS operator.
One option is to employ high-resolution digital terrain following for autonomous missions. This requires a flight plan constrained by a digital elevation model (DEM) of sufficient detail to include all obstacles and topographic changes greater than 10 cm. Most UAS terrain following systems rely on Shuttle Radar Topography Mission (SRTM) data with a 30 m resolution, which is too coarse for this purpose. Site-specific UAS photogrammetry and/or LiDAR mapping could be used to produce a sufficient DEM. However, a flight area with moderate topographic relief could require thousands of waypoints to maintain a constant height above the ground or objects. Such a large number of waypoints would require time-consuming processing on the UAS and would likely exceed hardware limitations (the DJI Matrice 600 Pro UAS, for example, is limited to 99 waypoints). A DEM terrain following approach at this altitude with 10 cm positioning accuracy would also require RTK GPS.
A more practical option is to use an on-board sensor that automatically maintains above ground altitude during flight for terrain following. Most UAS rely on barometric altitude, which is only accurate to 3 m. UAS equipped with downward facing 24 GHz radar rangefinders, on the other hand, are capable of flying autonomous missions with an above ground accuracy of 10 cm. Radar sensors perform better than LiDAR rangefinders under these conditions because they are less susceptible to interference caused by shaking plants and water ripples generated by propwash. At greater flight altitudes (> 45 m above ground), LiDAR rangefinders may be more appropriate due to their superior range.

We tested two radar altimeter systems on UASs, both with encouraging results (Figure 1). First, we used the UgCS SkyHub system with a Nanoradar NRA24 rangefinder on a DJI Matrice 600 Pro UAS. This system, developed by SPH Engineering in Latvia, employs their UgCS software and an on-board computer to send flight adjustments to the flight controller using the DJI SDK protocol. To our knowledge this is the only commercially available radar terrain following package for DJI drones. Second, we constructed our own UAS using a Pixhawk Cube flight controller on a DJI S1000 airframe equipped with an Ainstein US-D1 radar rangefinder. Both systems were capable of maintaining a magnetometer payload suspended 30 cm above ground or water at a velocity of 2 m/s (Figure 2). The UgCS product is readily available for DJI enterprise-level drones. The Pixhawk Cube affords more flexibility than the DJI flight controller and is used by many heavy lift UAS manufacturers in the United States. However, it requires substantial hardware and software knowledge to install and operate.

The UAS terrain following system was tested at a bog in New Hampshire using an experimental magnetometer payload provided by White River Technologies. The variable-density vegetation and transition from land, bog, and open water provided challenging and realistic flight conditions. Inert (deactivated) UXO targets were placed within a 10 m by 50 m area and flown with a 1.5 m grid spacing at 3 m above ground altitude (sensor 1.5 m above ground/water). The UAS followed the terrain well, smoothly transitioning between the 1 m thick shrubs to open water. The accurate, autonomous flight lines and uniform above-ground/water altitude facilitated reliable target detection by the airborne magnetometer (Figure 3).
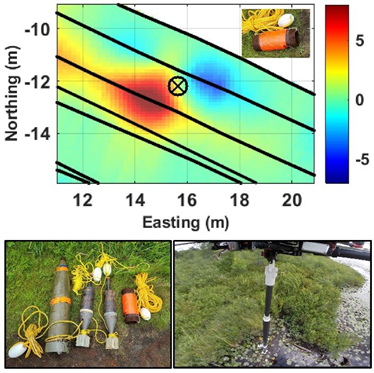
Bottom left – various test target UXO items. Bottom right – drones-eye view of the magnetometer payload.
This project demonstrates that a UAS equipped with a radar rangefinder and magnetometer is an effective tool for detecting UXO in environments that would otherwise be difficult or dangerous to survey by traditional ground-based methods. More complex terrain with obstacles may require a combination of high-resolution DEM modeling in addition to radar terrain following. Similar methods should work well for deploying other geophysical instruments by UAS, including EM and GPR. Although employing these techniques requires an experienced UAS operator, the technology has clearly evolved to a point where UASs are capable of conducting autonomous geophysical surveys at sub-meter altitudes.
This research was funded in part by the SERDP-ESTCP program, project MR19-5212.
Author Bios

Martin Helmke, PhD, PG West Chester University of Pennsylvania 750 S. Church St. West Chester, PA 19383 mhelmke@wcupa.edu
Dr. Helmke is a Full Professor of Hydrogeology in the Department of Earth and Space Sciences at West Chester University of Pennsylvania, President of Helmke Hydrogeologic, LLC, and Past President of the Pennsylvania Council of Professional Geologists. He is an FAA-licensed drone pilot with over 20 years of experience applying fixed-wing and multi-rotor UAVs for scientific research and commercial clients. He is a scientific advisor to Groundwater and Environmental Services, Inc’s UAV services program. Current research projects include UAV magnetometer deployment strategies to map UXO and pipelines, multi-instrument detection of abandoned petroleum wells, multispectral fracture trace analysis, and geophysical characterization of sinkholes and subsidence.

Gregory Schultz, Ph.D. White River Technologies, Inc. 115 Etna Road, Bldg. 3 Ste 1 Lebanon, New Hampshire 03766 schultz@whiterivertech.com
Dr. Schultz is the Chief Technology Officer at White River Technologies, Inc. and Principal Investigator for geophysical system DOD research and development programs such as the ESTCP project MR19-5212. He has 18 years of experience with autonomous sensing, geophysical data processing and inversion, simulation, and implementation of miniaturized magnetometers in ordnance clearance, infrastructure, and environmental applications. He is leading multiple efforts to integrate advanced magnetometer and electromagnetic sensor payloads on a variety of unmanned systems including autonomous fixed wing and rotary aircraft and autonomous underwater systems.
