
Preface
This article is based on Amira Global Project P1204 – Developing UAV- Mounted Geophysical Sensor Arrays. Contributing authors were Dr. Jan Francke (Groundradar), Prof James Macnae (RMIT), Dr Brian Minty (Minty Geophysics), Dr David Clark (CSIRO), Prof Giles Hammond (The University of Glasgow), and Dr Michael Hussey (Mineral Spectra Mapping). A public version of the final P1204 project report will be available from Amira Global in the near future. Examples of commercially available sensors have be included for illustration purposes but inclusion does not imply endorsement by AMIRA of the illustrated product alone or over any other commercially available alternative.
Introduction
Drones are being touted as the future of field geophysics (Figure 1). However, two key questions surrounding drone use are which methods benefit most from this technology, and do drones appear to offer solutions to problems that may not exist?
Over the past two decades, unmanned aerial vehicles (UAVs), or drones, have evolved from military surveillance craft to hobbyist test beds to lucrative commercial enterprises for geospatial mapping. Today, the commercial UAV market is growing exponentially, with new types of aircraft, power plants, and sensors extending their application monthly. The advantages of machines that can perform repetitive spatial tasks – and travel easily and cheaply into places where humans cannot – are obvious. In topographic surveying and GIS applications, UAVs with cameras and lidar have been able to produce maps with unprecedented detail and accuracy in a fraction of the time and cost of traditional surveys. In the agriculture sector, UAVs have been fitted with multispectral cameras to capture field variability that is invisible to the eye, enabling farmers to detect diseases early and improve crop yields.
Near-surface geophysics is intrinsically repetitive in nature, and often involves moving instruments along a pre-defined survey grid, usually close to or on the ground surface. Commonly, data density is a function of time and budget. A machine that is able to collect data points safely, at minimal cost, and at any density is an attractive prospect, provided the machine can safely carry the required instrument, has sufficient endurance to manoeuvre the survey terrain, and the site’s vegetation lends itself to this type of approach. Although the concept of mounting geophysical sensors on UAVs dates back a few decades, only in the last ten years have the tools necessary to make commercial surveys a reality been developed: sensors that are sufficiently small, light and energy efficient and drones with the required endurance for typical surveys.
Today, UAV-borne magnetics and VLF surveys are commonplace, and drone-mounted GPR systems (Figures 1 and 2 ) are gaining acceptance. Of relevance to near-surface mapping are the anticipated developments in EM, gravimetric, radiometric, and hyperspectral instrument miniaturization. Regardless of their utility in geophysical surveys, UAVs currently account for a fraction of the commercial geophysical surveying market. Their acceptance has been limited by the availability of suitable UAV platforms to carry larger payloads over longer flights, the lack of available lightweight sensors designed for airborne use, the lack of skilled service providers, and the ever-evolving restrictive legislation governing commercial UAV use.
These limiting factors are being mitigated by disparate developments. New UAV powerplants such as hydrogen fuel cells hold the promise of enabling drones to operate carrying heavier payloads and with greater endurance. Highly accurate RTK-GPS positioning with radar, sonar and lidar terrain-following and obstacle-avoidance sensors are plummeting in price and complexity. The ability to coordinate swarms of sensor-carrying UAVs, operating autonomously or in formation, offers the potential to increase source power and exploit complex source-receiver geometries for EM and GPR surveys.

Magnetometers and VLF Sensors
Given their relatively small size, magnetometers were naturally the first instruments to be mounted on UAVs (Figure 2). Due to the labor-intensive nature of ground surveying and the cost of traditional manned aircraft, magnetometer-equipped drones continue to account for most UAV-borne geophysical surveys. One significant technical challenge is the suppression of magnetic noise created by the platform’s motors and electronics. In manned aircraft surveys, this interference is mitigated by longlining the sensor below or behind the aircraft, and/or through sophisticated compensation methods using secondary on-board magnetometers. Since additional compensating instruments are weight prohibitive for use on UAVs, sensors must be towed from long cables below rotary UAVs or generally at the wingtips of fixed-wing aircraft. Magnetic noise may be further lessened by using combustion engines rather than electric motors, although the trade-off is a significant increase in weight. The noise in magnetic measurements during flight should be on the order of < 2 nT.
The use of rotary or fixed-wing UAVs is a function of survey objectives, with helicopter or multi-rotor UAVs being the most suitable for low altitude (0m – 10m) surveys with tight line spacing to detect small discrete targets, such as UXOs, or for archeological applications. In contrast, fixed-wing UAVs are suitable for larger surveys such as those conducted in mineral exploration. At present, there are multiple manufacturers globally that produce UAV magnetometers, including some gradiometer systems. These sensors are potassium or cesium vapor, chip-scale atomic or triaxial fluxgate designs, because vector field measurements require additional highly accurate tilt, roll, and yaw sensors.
Like any maturing technology, the cost of sensors, and thus the cost of UAV magnetometer surveys, is expected to drop in the coming years as the technology gains acceptance in the geophysical community. Concurrently, the cost of ancillary instrumentation, such as altimeters, collision-avoidance and GNSS sensors, is plummeting. Through developments of this kind, the potential of UAV magnetometer swarms, in which simultaneous measurements are taken at various elevations to discriminate between shallow and deeper magnetic sources, may be realized.
Drone mounted VLF systems are now being offered (Figure 3). At least one currently available UAV-borne VLF system offers measurements of vertical in-phase and quadrature data as a percentage of the total field within the VLF frequency range of 15 – 30 kHz from two transmitting stations simultaneously, regardless of sensor orientation.

Figure 2. Commercially available magnetic sensor systems for drone magnetic surveying
LEFT: https://sensysmagnetometer.com/products/systems/aerial-survey-systems/magdrone-r3-magnetometer-kit/
RIGHT: https://www.geometrics.com/wp-content/uploads/2020/07/MagArrow-Spec-Sheet.pdf





Ground Penetrating Radar (GPR)
Low-frequency GPR systems have been longlined from helicopters for glacier surveys for decades by research organizations. In recent years, certain GPR manufacturers have touted their ground-coupled GPR systems for deployment by UAVs (Figure 4). It can be argued that GPR has historically been the near-surface geophysical method that has generated the greatest volume of marketing hype and inflated claims, particularly in relation to statements about expected penetration depths; these claims are always predicated in sales material with the disclaimer “up to”. Although it represents the highest resolution geophysical method, GPR penetration is inhibited by high electrical conductivity and water content in the ground, limitations that are exacerbated when using drones.
When a GPR antenna is decoupled from the dielectric, the air-to-ground interface can act as a mirror for many typical geological settings. In the best-case scenarios for low ground resistivities and hyper-arid conditions (e.g., ice, dry snow, and some deserts), less than 20% of the radar energy is reflected at the ground surface. In wet soils or fresh water, over 80% of the energy is reflected skywards, thereby severely limiting effective penetration. Further, antennas lifted in the air have a larger illumination zone and, unless lengthened to account for the lower dielectric permittivity of air, they will be less efficient than they are on the ground. More directional Vivaldi or horn antennas may be considered, but these are likely be too unwieldy for practical use when lifted by existing UAVs.
The limitations of physics are overshadowed in many jurisdictions (e.g., Canada, the USA, and Europe) by legislations restricting the use of GPR technologies to within 1 m of the ground surface. Indeed, maintaining a flight altitude of less than 1 m also addresses the limitations of physics discussed earlier; however, in doing this, some of the advantages of UAVs, such as rapid areal coverage, are diminished.
GPR systems are now being designed specifically for UAV applications with total instrument weights, including batteries, of less than 400 g (Figures 1 and 4). Nevertheless, with equipped drones often travelling at 2 m/s with a maximum line distance of around 2 km per flight, such low altitude requirements may relegate UAV-borne GPR surveys to situations where human, vehicle, or ground robotic towing methods are impossible. It is unlikely that drone GPR will supplant conventional cart or towed-array GPR surveys for typical applications such as utilities detection.
New, low-cost multi-channel GPR instruments are currently in development that may be light enough to be lifted by a single low-flying UAV or a synchronized drone swarm. This type of arrangement may allow the collection of wide-angle reflection and refraction (WARR) data, which could be used to map the 3D distribution of radar velocities and by extension, relative soil moisture for agricultural applications. Further developments, such as the design of small, low-frequency antennas, may make it possible to use drone swarms to improve profile resolution in 3D and SAR data acquisition.


Figure 5. A multifrequency FDEM sensor for a drone
http://www.geophex.com/Product%20-%20UAV-mounted.htm

Figure 6. Helicopter drone with a lightweight radiometric detector
https://the.medusa.institute/display/GW/Towards+drone-borne+gammaray+mapping+of+soils
Electromagnetics
For the purposes of this discussion, large-loop airborne EM (AEM) surveys with powerful transmitters used for mineral exploration will be disregarded. For the shallow frequency and time-domain EM surveys typically used in near-surface mapping applications, at least one repurposed ground FEM system is currently being marketed as having the capacity to be longlined from a drone. An example of a FEM system stripped down for drone operation is shown in Figure 5.
In addition, a TEM system intended for UXO mapping has been discussed in the literature; again, this system is one that is longlined from a UAV to avoid interference. Given the relatively simple design of FEM and TEM instruments and the large environmental geophysics market, it is entirely possible that a number of new sensors will be commercially available in the coming years.
Radiometrics
UAV-borne radiometric mapping has multiple applications, ranging from precision agriculture to mineral exploration. The previous decade has seen gamma-ray spectrometric data collected using low-cost UAVs for dose-rate measurements in nuclear contamination sites. Large drones capable of carrying 100-kg sensors are being employed for radiometric mapping of mineral deposits in situations where the survey area is too small, the terrain is too extreme, or the line spacing is impractical for conventional airborne surveys. Such platforms are expensive and require special permits; however, in the future, it may be possible to use smaller (lighter) crystals on smaller UAVs to fly lower and slower than conventional airborne surveys and achieve similar signal-to-noise ratios. If sufficiently inexpensive platforms and sensors can be developed, the use of independent drones flying in formation would dramatically speed data acquisition. A lightweight radiometric sensor system is shown in Figure 6.
Gravimeters
Gravimetric surveys have a number of applications in near-surface geophysics, and in contrast to large airborne surveys conducted for hydrocarbon or mineral exploration, they are generally conducted by a small ground survey crew. Current ground gravimeters are heavy (> 15 kgs) and likely unsuitable for UAV deployment due to the high kinematic accelerations of drones in flight. High-frequency engine vibrations may be dampened, but low-frequency accelerations would need to be tracked by an extremely precise and low-latency RTK-DGPS receiver.
A more feasible alternative is a deployment scenario in which a gravimeter is landed autonomously at a pre-defined spot by a drone using an auto-levelling gimbaled system for each reading, before being lifted and repositioned at the next reading location. In order for this “grasshopper” mode to be effective, an a priori survey would need to be undertaken beforehand to map relatively flat, vegetation-free landing spots. There are several small-form-factor systems under development that show promise as suitable geophysical gravimeters (for example see Figure 7). These systems are based on either strapdown linear/rotational accelerometers, or traditional 1- or 3-axis MEMS accelerometers. The need to pre-map suitable landing spots may preclude any advantages drone gravimetry may have over traditional ground surveys in all but specific flat and barren settings.
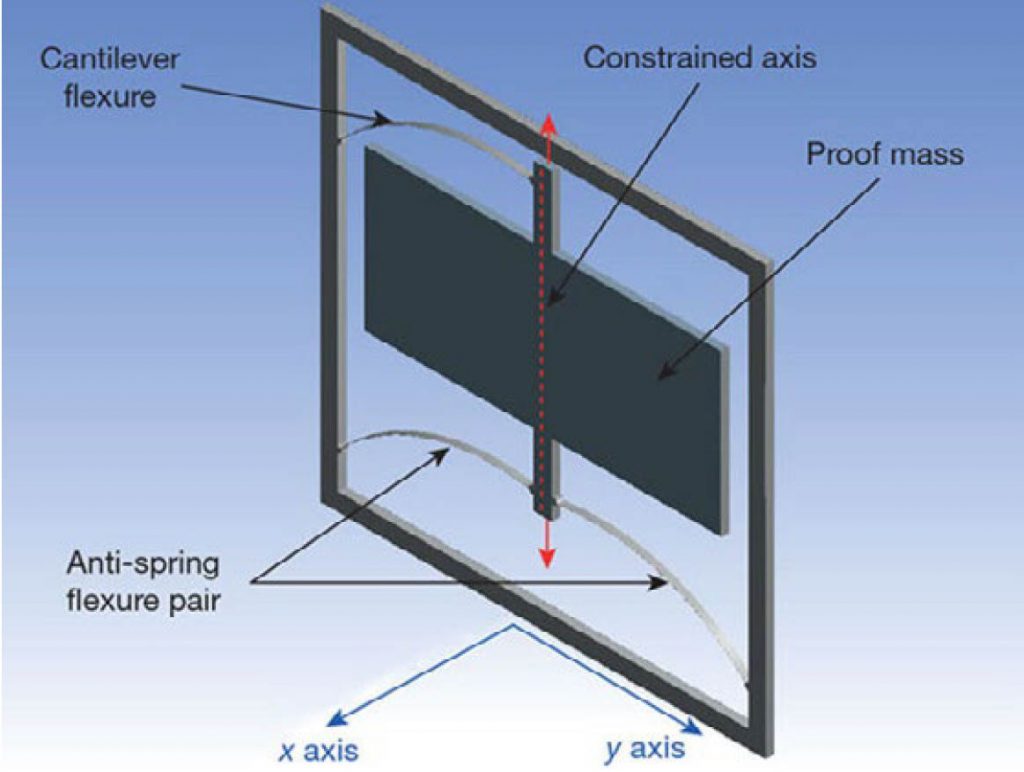

Figure 7. MEMS gravimeter mechanism (Illustration: Giles Hammond) designed by Dr Richard Middlemiss, Glasgow University Institute for Gravitational Research (http://www.physics.gla.ac.uk/igr/index.php).
https://spectrum.ieee.org/energywise/energy/fossil-fuels/stampsized-gravity-meter-could-have-big-impact-on-oil-exploration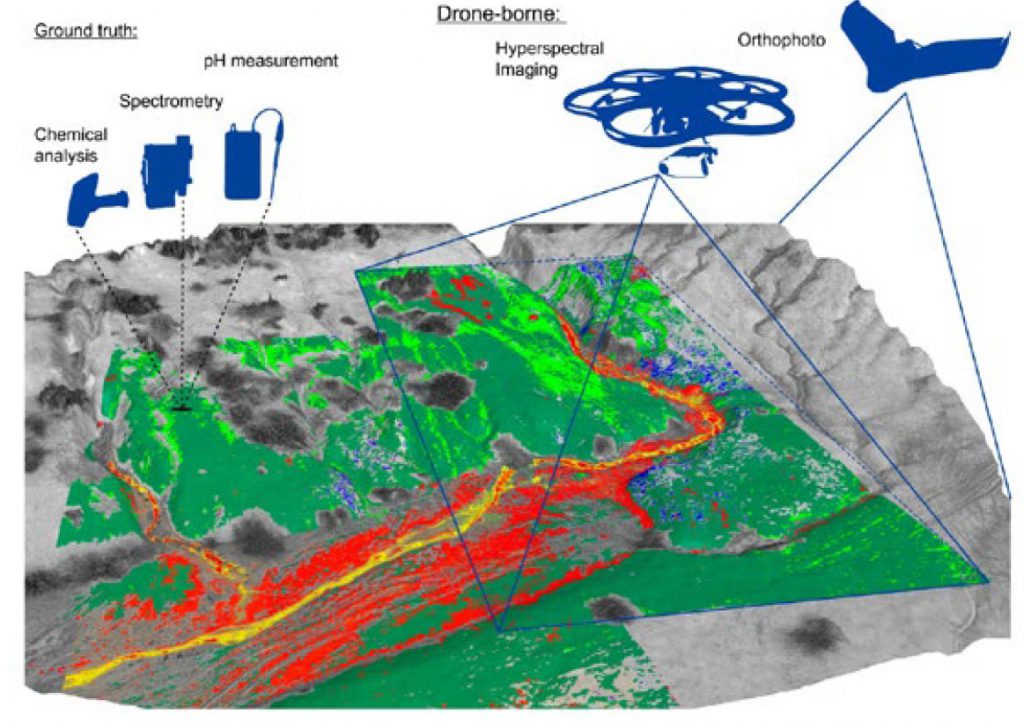

Figure 8. Drone-based Hyperspectral imaging concept schematic
https://www.mdpi.com/remotesensing/remotesensing-10-00385/article_deploy/html/images/remotesensing-10-00385-g001.png
Hyperspectral Cameras
Maps showing mineral distributions generated by visible and infrared cameras mounted on satellites and aircraft are commonly used for mineral exploration; these have varying pixel resolutions to as little as 1 m (refer to the schematic in Figure 8). The cameras themselves have been sufficiently miniaturized to scan drill cores on trays to sub-mm resolution. Ideally, for open-pit mining operations, scanning blasted benches at 20 cm resolution would be ideal, but this would be impossible to achieve from aircraft. A multirotor UAV fitted with a hyperspectral camera could be deployed for this type of application.
At present there are three hyperspectral cameras designed for UAV applications that cover the wavelengths required for mapping minerals. Instrumentation is expensive (around $300,000 USD), and these costs are unlikely to drop substantially due to the complexity of the instrument and the limited market demand. Agricultural hyperspectral mapping requires a narrower bandwidth, and many manufacturers now offer UAV imager solutions.
A new application for UAV-borne hyperspectral mapping is combining the camera with a lidar sensor on a UAV, which is also fitted with sophisticated collision avoidance radars and inertial navigation systems to autonomously map tunnels for underground mining operations.
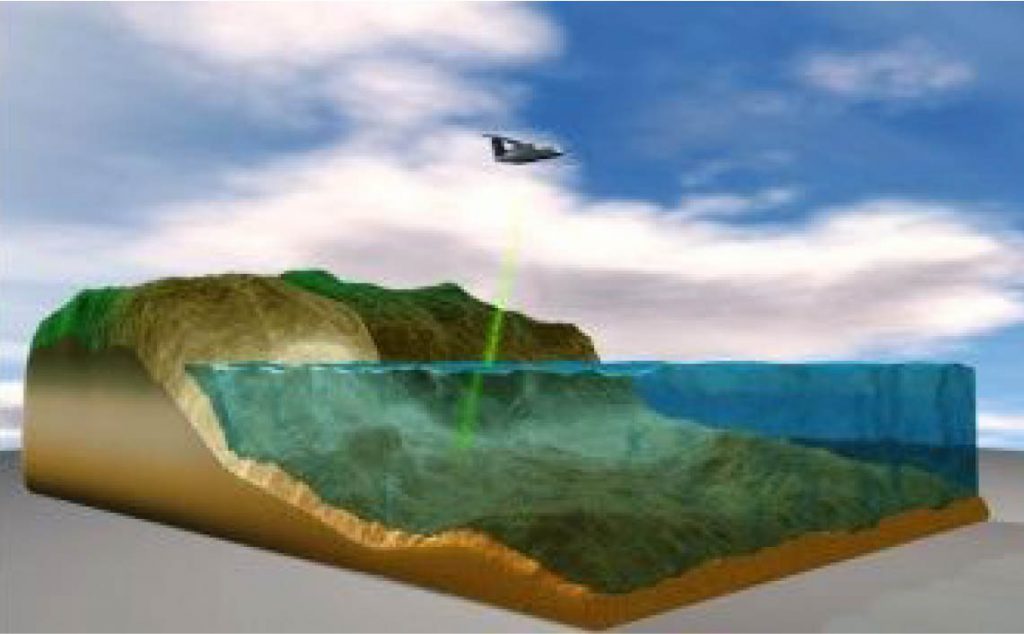
https://www.hydro-international.com/content/article/technology-in-focus-bathymetric-lidar
Lidar Bathymetry
A significant challenge in littoral zone mapping is the merging of two datasets from different sensors and vertical datums; i.e., lidar for terrestrial mapping and sonar for bathymetry (refer to the schematic in Figure 9). New bathymetric lidar systems using green (532 nm) lasers offer a solution for seamless DEM generation employed in nearshore charting, coastal monitoring, river and inland water surveys, and environmental monitoring. Shallow water sensors (< 10 m) generally emit less power per pulse and have higher resolutions and narrower illumination zones compared to deep water systems, which have been used to 75 m depth.
Recently, bathymetric lidars have been designed that are light enough and small enough to be mounted on UAVs. UAV-borne DEM and bathymetric mapping would revolutionize littoral DEM generation by offering a higher point density than ground or manned aircraft surveys at a fraction of the cost. In addition to green light lidars, multispectral airborne lidar sensors are being developed that could produce 3D surface spectral responses during the day or night in complex environments using a single lidar sensor. Although these are presently being deployed on manned aircraft, it may be possible to miniaturize such lidars for drone deployment.

https://wirelessseismic.com/darts-drones-future-onshore-seismic/
Gas Detection
A number of manufacturers are producing UAV-portable gas detectors for 3D environmental monitoring, ship emission verification, leak detection and HAZMAT response applications. In addition, methane detection can be used to monitor permafrost thawing in climate change studies. Modern drone gas detectors have real-time upload capabilities and use on-board cellular modems connected to cloud platforms for immediate visualization of collected data.
Seismic Surveying
Typically, a method heavily reliant on ground crews, drone-deployed wireless geophones are being tested in the steep, inhospitable tropical jungle environments of Papua New Guinea, as well as in the deserts of the UAE. The concept is that a drone carries a rack of bomb-shaped geophones, which are dropped from a sufficient height to penetrate the vegetation canopies and embed themselves into the moist jungle floor, or in the case of the UAE, soft aeolian sand (Figure 10). At present, the geophones in PNG are then retrieved by hand after shooting the spread, somewhat obviating the advantage of drone deployment. However, in the UAE, robotic geophone collectors are being tested in an effort to further automate large-scale 3D seismic exploration projects.
The concepts being tested in this ambitious project have implications for other applications of drone geophysics . In one potential scenario, a swarm of drones is deployed , including individual drones dedicated solely to surveillance. Prior to “carpet dropping” thousands of geophones, an a priori drone survey is conducted using lidar to create a high-resolution DEM. This DEM can be studied by the survey team to determine the optimal drop points and flight paths. The intent is for semi-autonomous drones to adapt to changes in the environment, both airborne (aerial intrusion) or on the ground (avoiding people, animals, and buildings) in real time.
This type of approach could be used for UAV gravimetry surveys in grasshopper mode or to deploy passive seismic sensors for bedrock profiling.
Sensor Fusion and Data Processing
Similar to conventional airborne surveys, geophysical service companies will seek to optimize survey time and budgets by combining sensors on drones to collect multiple datasets. The challenges posed by this type of scenario are increased weight and power requirements and the issue of interference between instruments. Instruments that are sensitive to dissimilar phenomenon and sufficiently light may be mounted on or towed beneath drones, for instance, a viable configuration could include a combination of magnetometers, VLF receivers and radiometrics sensors. Ideally, sensor and drone manufacturers would collaborate to establish a modular “plug-and-play” interface for the physical mounting, power, and ancillary data supplies.
The power of cloud computing is being exploited for geophysical datasets, and this will shape data editing, processing, and inversion in the near future. Recently, a new platform is being offered that harnesses machine learning algorithms to semi-automate processing and interpretation of large GPR datasets, which are often considerably more complex than other near-surface geophysical methods.
Legal Considerations
Often overlooked when considering the future of drone geophysics is the dynamic and generally increasingly restrictive legislative framework used to regulate commercial drone operations in most jurisdictions. This is of particular concern in hydrocarbon and mineral exploration geophysics, where surveys involve flight patterns over large areas, and the survey takes place beyond the line of sight of the drone pilot. Such flights are heavily restricted in many jurisdictions. Survey areas are generally much smaller for near-surface geophysical applications, and while such regulations may not apply, those related to flights over people or populated areas may. As the practice of geophysics is unregulated in many countries, the burgeoning interest in drone geophysics may inadvertently result in further legislative restrictions being placed on the practice.
Summary
Drone geophysics is now a well-established survey method, particularly for magnetics. The higher point density, lower cost, and ability to safely operate in dangerous terrain and environments offer clear advantages over conventional survey methods. The factors currently limiting more widespread use of drones are the lack of lightweight, low-cost, portable geophysical sensors and the high cost and low endurance of suitable drones. For methods such as hyperspectral imaging, the risks associated with mounting a $300,000 sensor on a drone that could crash or experience a “fly-away” may limit acceptance until sensor costs are dramatically reduced.
Although mounting sensors on UAVs is being lauded as a panacea, balancing the risks and possible signal-to-noise compromises against the advantages of drone use is critical. Near-surface geophysical surveys are generally conducted over smaller regions than those studied in hydrocarbon and mineral exploration, obviating some of the advantages of drones. With the exception of dangerous or inaccessible sites, the drive to make every geophysical method drone-capable may be attempting to solve problems that don’t exist.
